NGC provides onboard optical navigation for autonomous terrain-relative navigation.
Such functions are critical for future Moon landing missions requiring precision landing.
Crater-Based Navigation
Absolute navigation matches the perceived environment with an onboard map. The absolute navigation system developed by NGC is a crater-based technique designed to autonomously provide Moon-relative position estimates for a lander. This fully autonomous technique processes camera images during the descent, extracts craters and matches the detected craters to a pre-stored reference crater map. The reference map is built prior to landing based on a Digital Elevation Model (DEM) of the Moon surface or orbital imagery. The image processing software is complemented by extended Kalman filtering algorithms to provide real-time state estimation. The system was operated with success by Firefly Aerospace in 2025 on its first lunar landing mission with its Blue Ghost Lander.
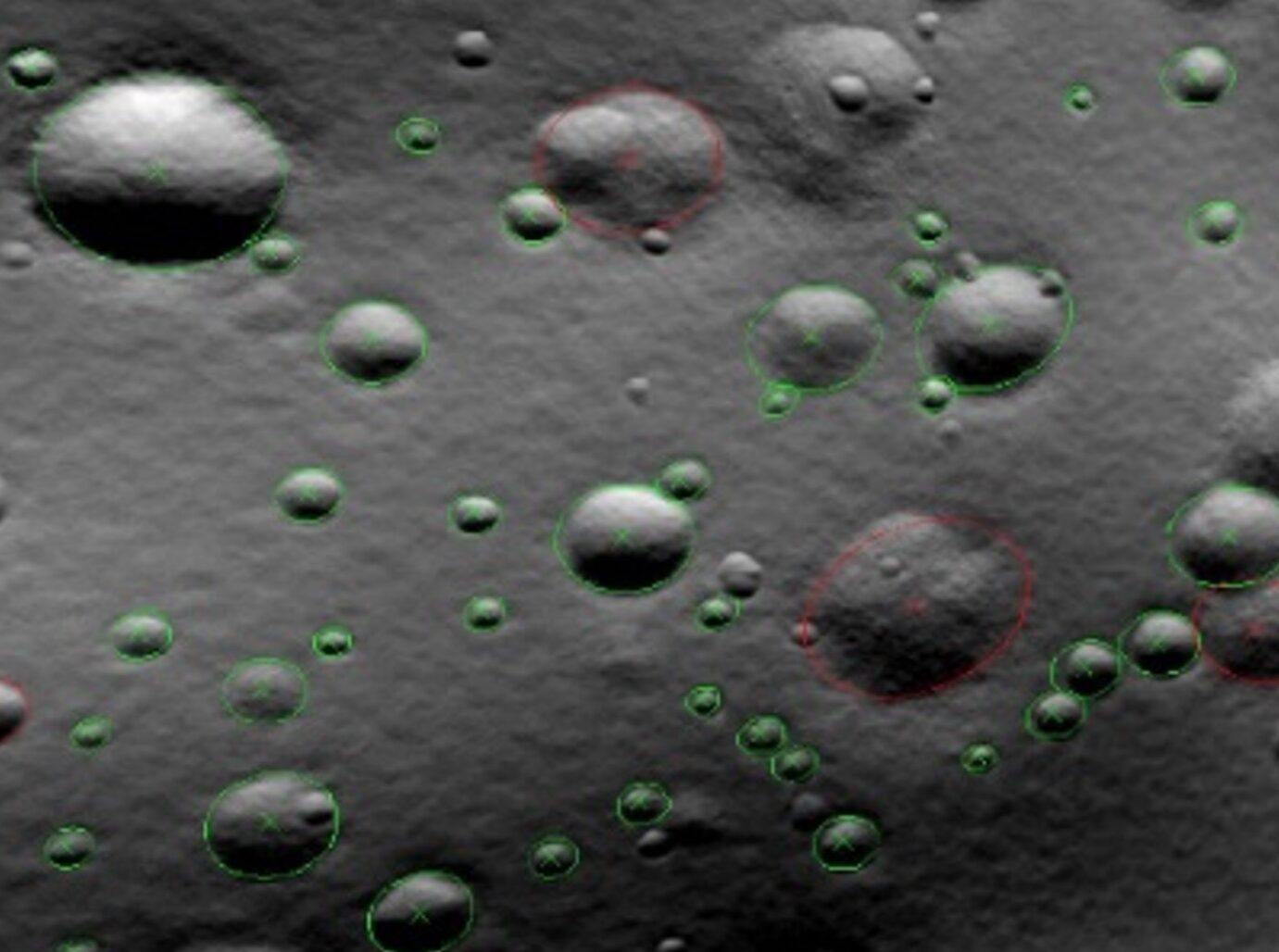
Synthetic Images
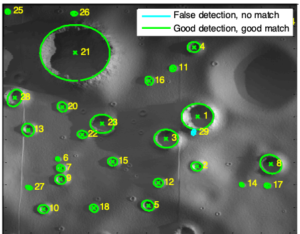
Laboratory Images
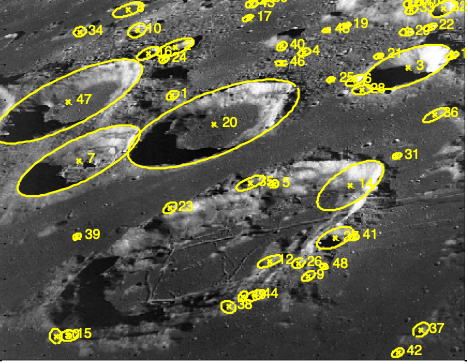
Apollo Images