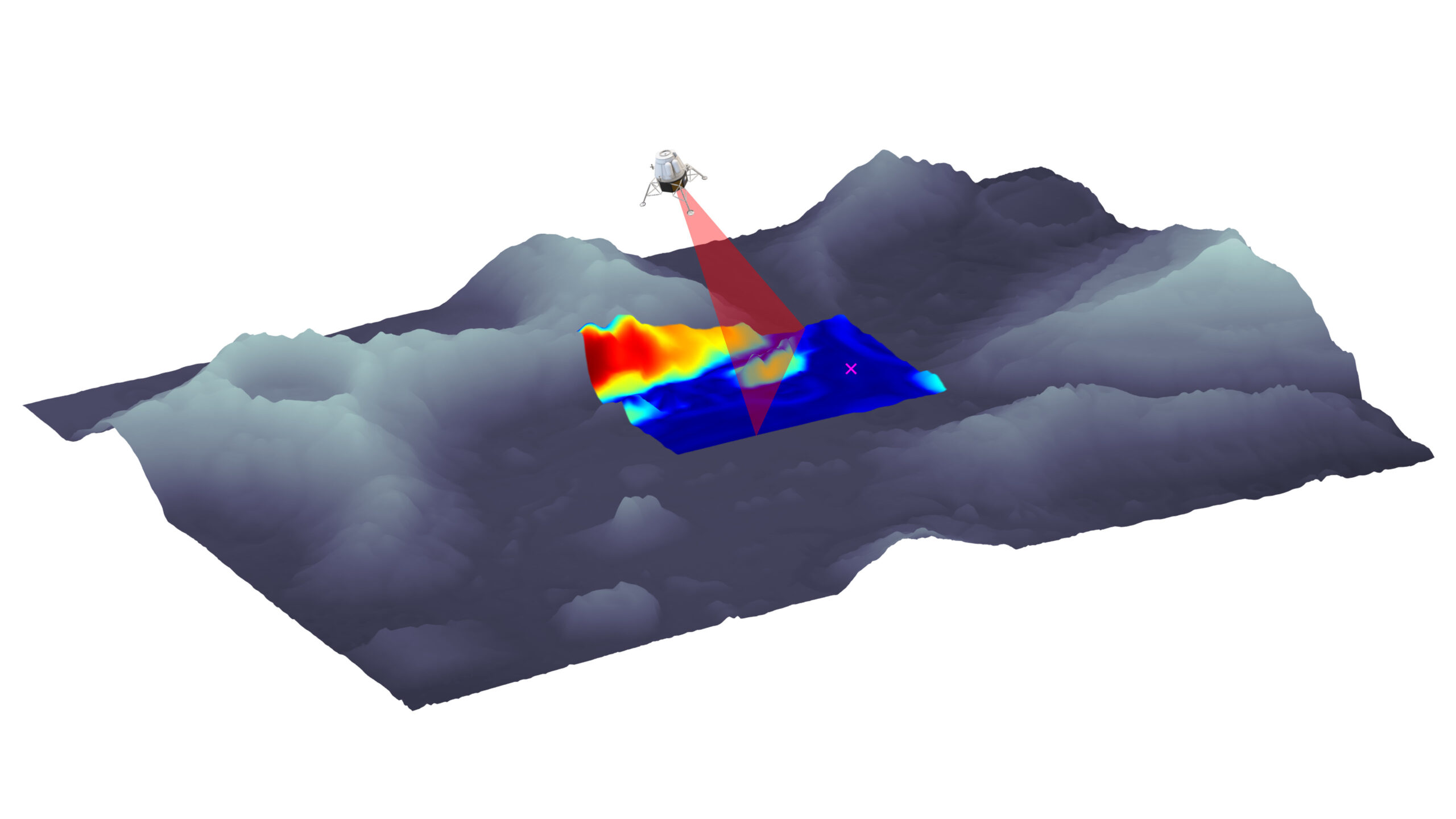
NGC’s Hazard Detection and Avoidance software system enables terrain mapping, hazard detection and safe sites designation in real time during landing manoeuvres.
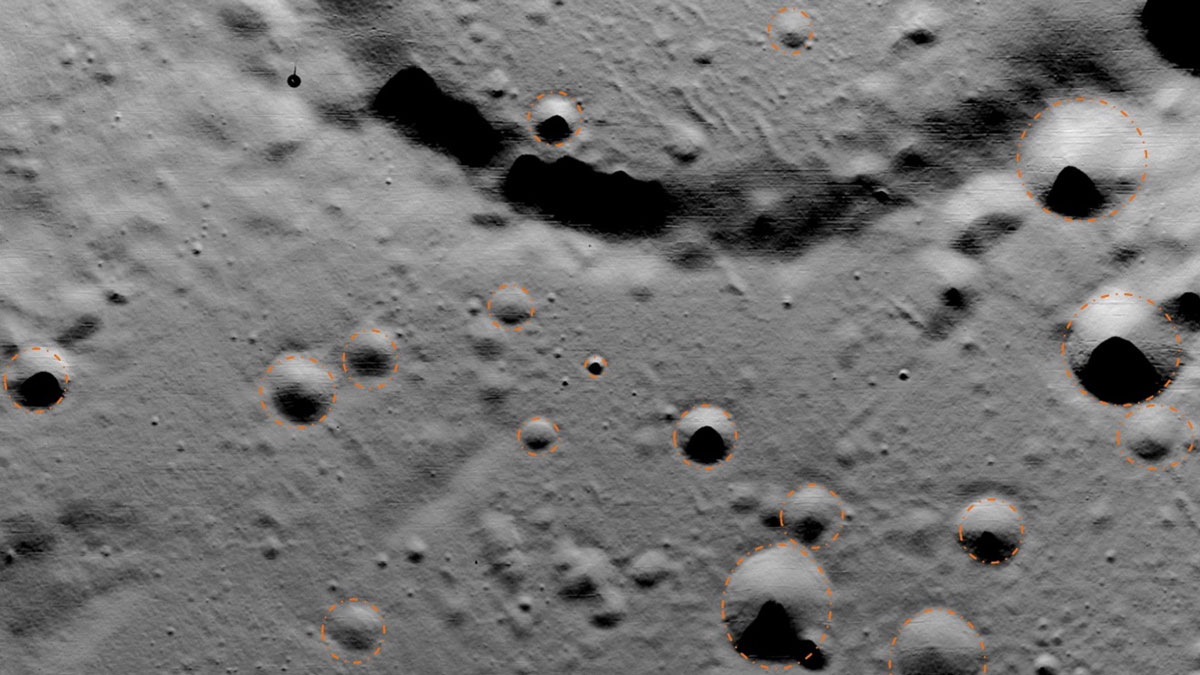
Autonomy is critical because communication delays with the ground and the need to react quickly preclude human intervention in the process. This system makes use of Light Detection and Ranging (Lidar) and camera sensor measurements to detect and identify surface hazards in real time during the descent.
Based on Lidar range measurements, camera images and knowledge of lander motion, this system computes various hazard-related properties of the terrain, such as surface slope, roughness, illumination and the propellant cost of reaching the site. This information is combined into a single hazard map that provides an overall safety assessment of each candidate landing area. The safest landing site, based on the evaluation of all these criteria, is proposed by the HDA system. This assessment is done in real time, a few hundreds of metres above the landing surface, while the lander is making its final approach.
One of the key features of NGC’s HDA system is its motion compensation function. The system can handle inputs from a scanning Lidar, which takes a few seconds to scan a complete frame. Since the lander is moving during the scanning process, the raw output of the sensor is distorted. However, based on the estimated lander motion during the scan, NGC’s software compensates for the motion and removes the distortions from the sensor measurement. This prevents imposing tight immobility constraints during the scanning process and improves the overall propellant efficiency of the mission.