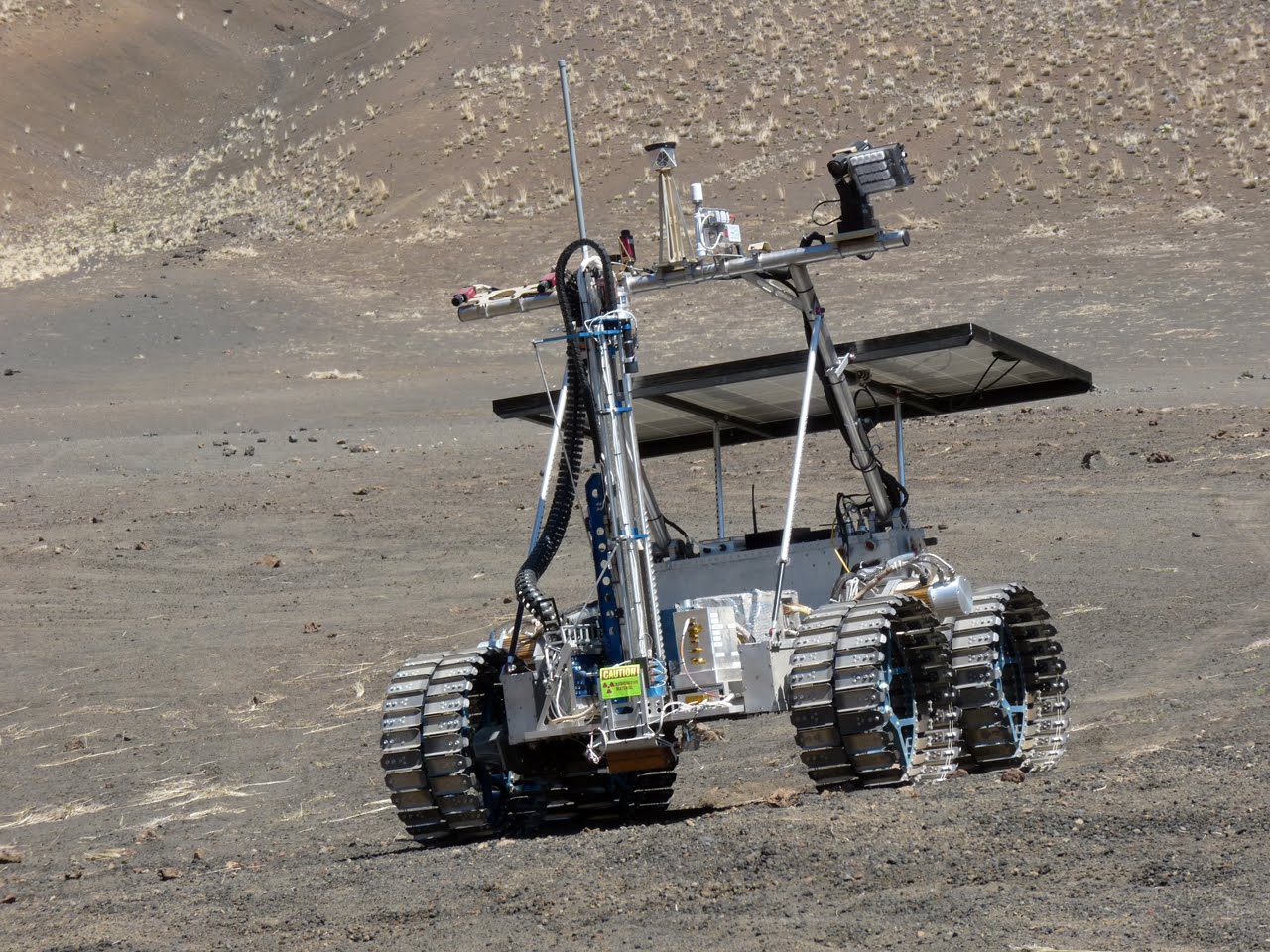
NGC provides onboard optical navigation for autonomous terrain-relative navigation.
Such functions are critical for future Moon landing missions requiring precision landing.
Crater-Based Navigation
Absolute navigation matches the perceived environment with an onboard map. The absolute navigation system developed by NGC is a crater-based technique designed to autonomously provide Moon-relative position estimates for a lander. This fully autonomous technique processes camera images during the descent, extracts craters and matches the detected craters to a pre-stored reference crater map. The reference map is built prior to landing based on a Digital Elevation Model (DEM) of the Moon surface or orbital imagery. The image processing software is complemented by extended Kalman filtering algorithms to provide real-time state estimation. The system will be operated by Firefly Aerospace on its first lunar landing mission with its Blue Ghost Lander.
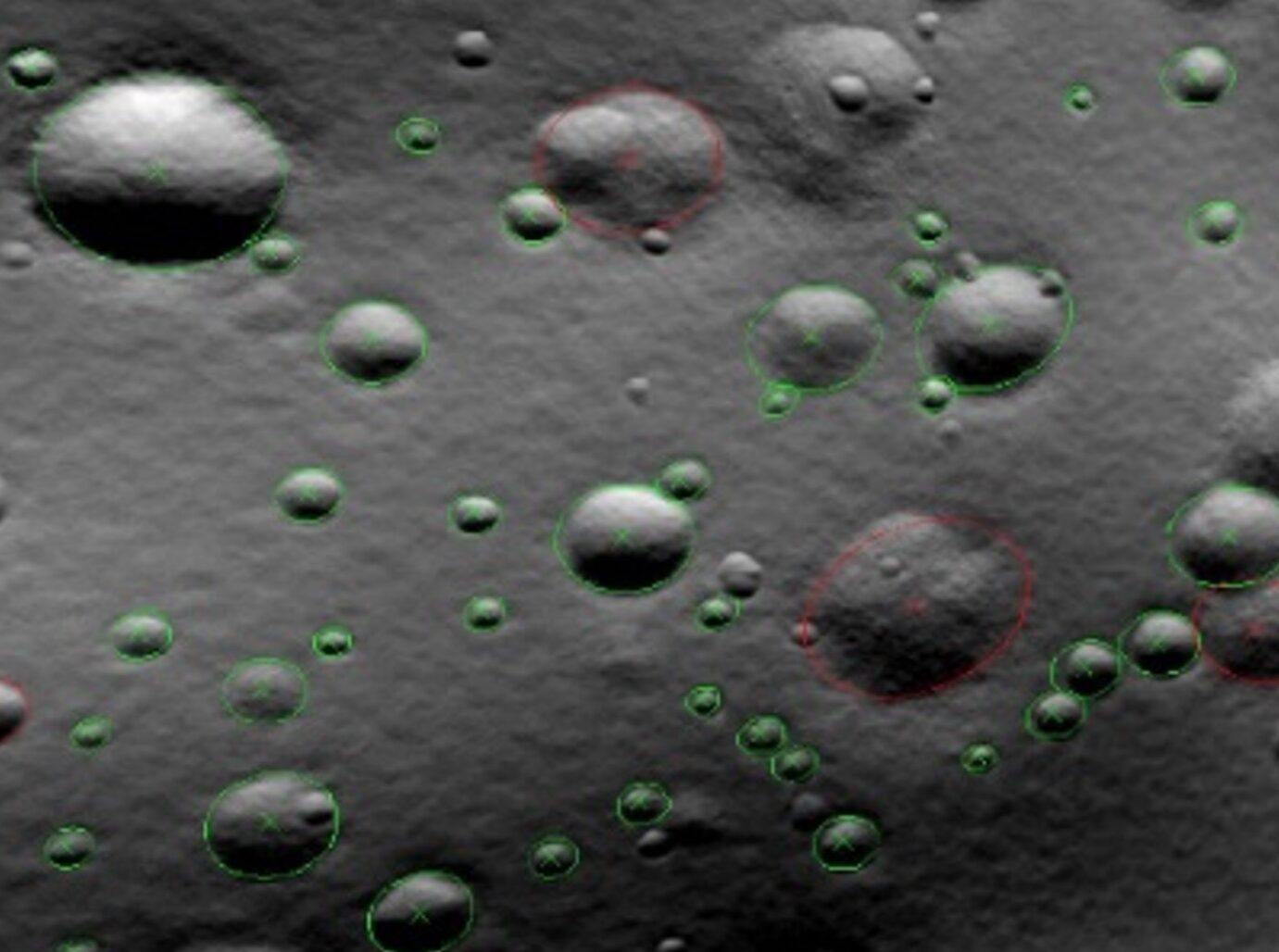
Synthetic Images
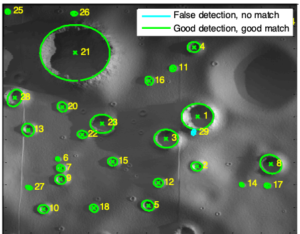
Laboratory Images
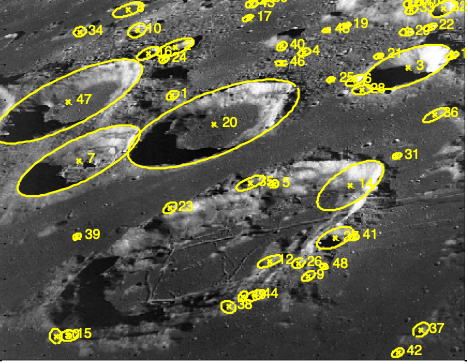
Apollo Images