NGC’s Vision-Based Navigation system for rovers has been deployed onboard the Artemis Jr Moon exploration prototype rover. It also successfully supported the field deployment campaign for the NASA RESOLVE experiment , whose primary goal is to characterize water and other volatiles in the lunar regolith.
NGC also developed a complementary Lidar-based localisation system that reconstructs surrounding terrain topography and matches it to a reference Digital Elevation Map (DEM) of the area. This system was also field-demonstrated as part of the Artemis Jr development activities.
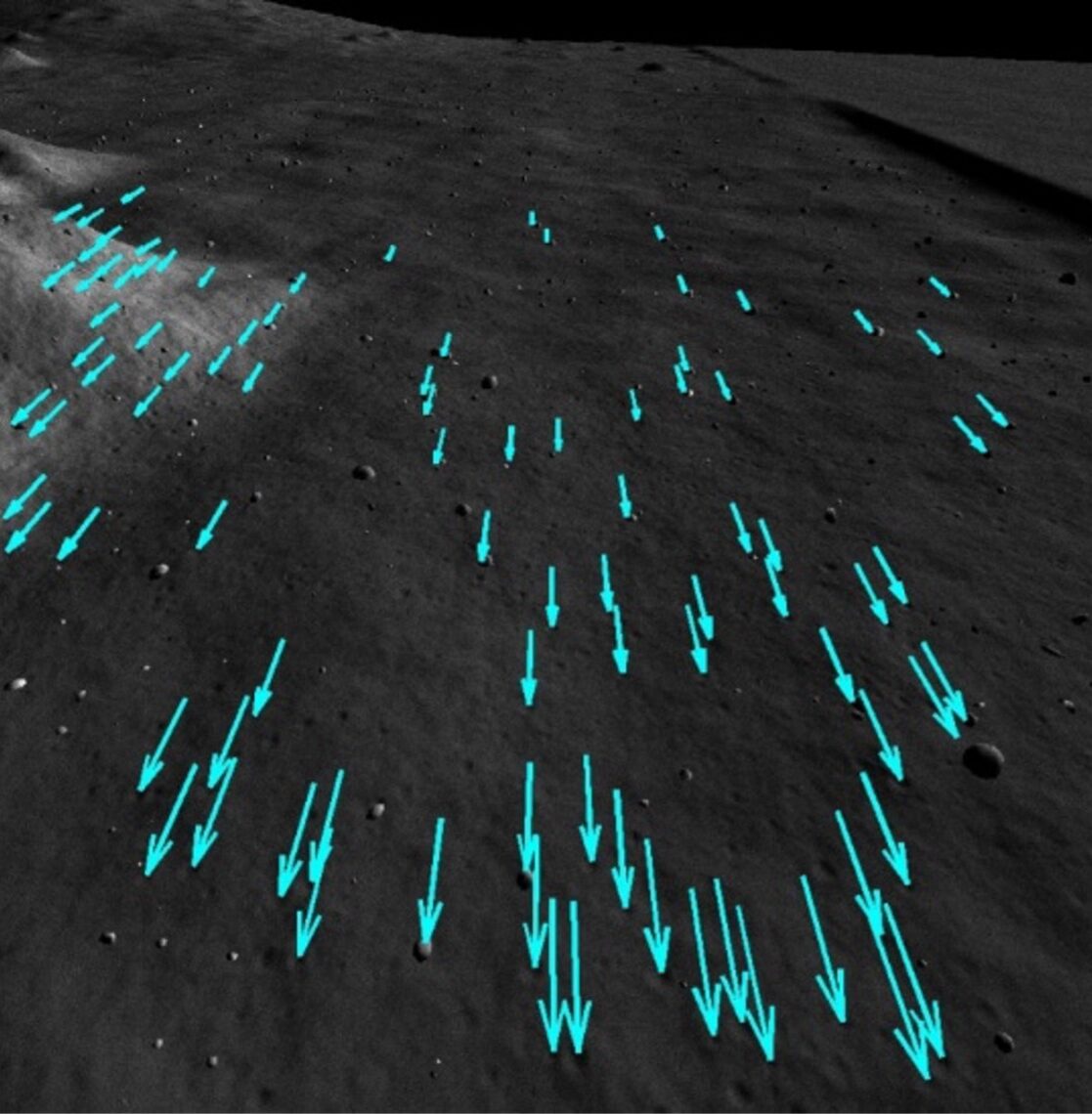
Rover Motion detection from image processing
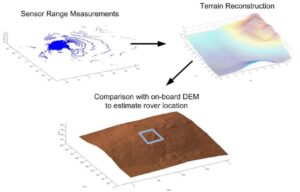
Rover Absolute Position Determination System



