UAV over test area
The prototype demonstrated the capability to scan the terrain at the desired resolution with an affordable commercial Lidar, the capability to ground-reference the Lidar measurements relying on the drone navigation and finally the possibility to identify surface hazards and recommend a safe site in real time.
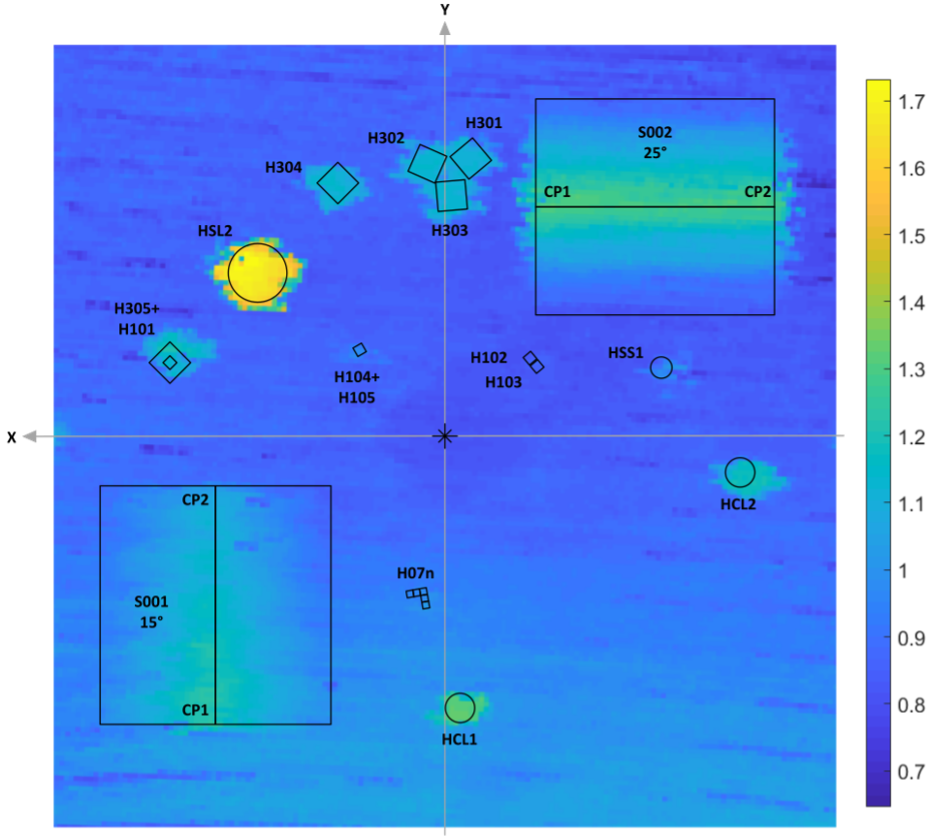
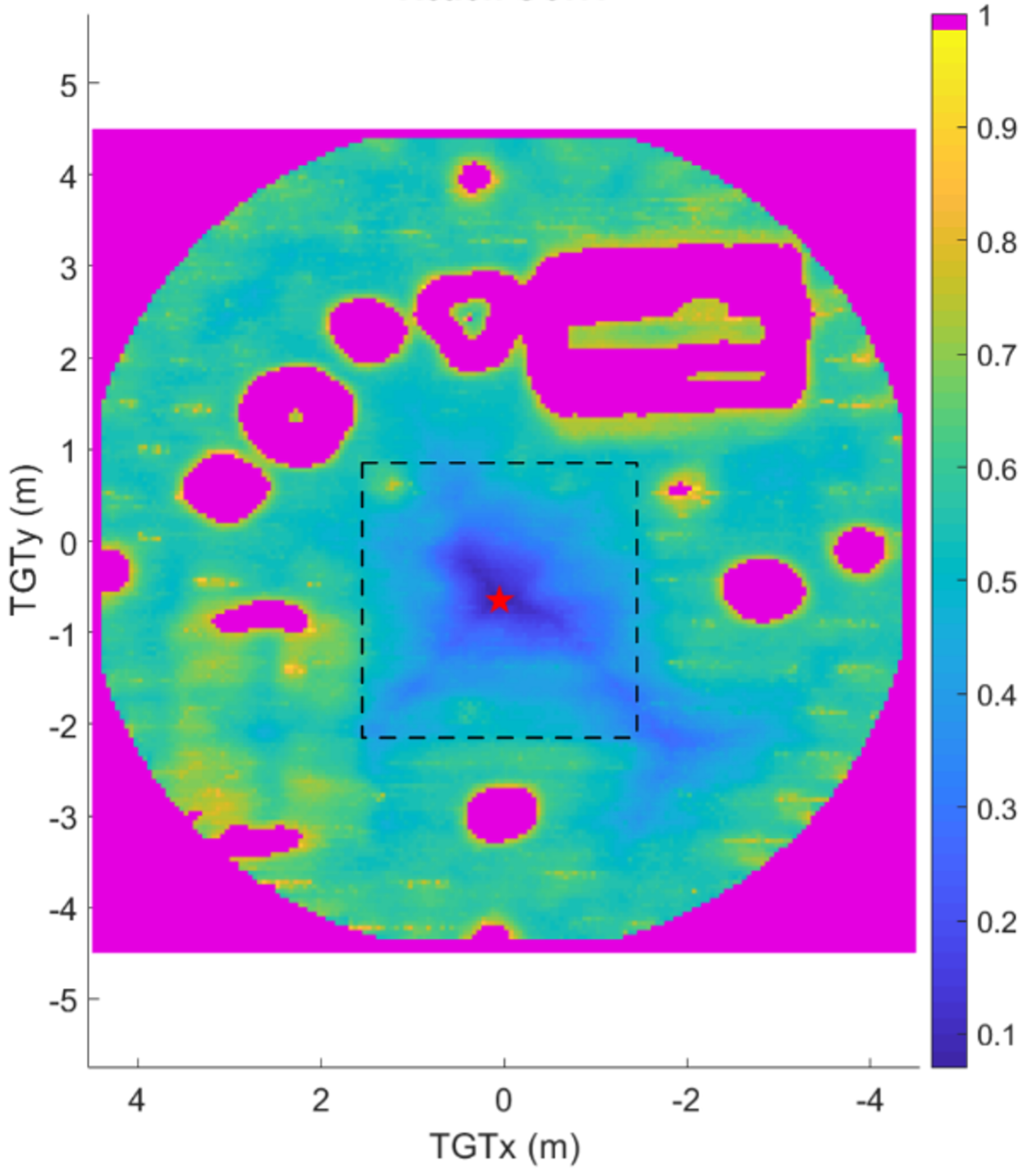
The system was tested with various roughness and slope hazards positioned over a reference landing area. Tests demonstrated that the system was able to reconstruct and accurately locate the hazards positioned on the surface. The reconstructed topography was used to assess in real-time surface slope and roughness and recommend a safe landing site.