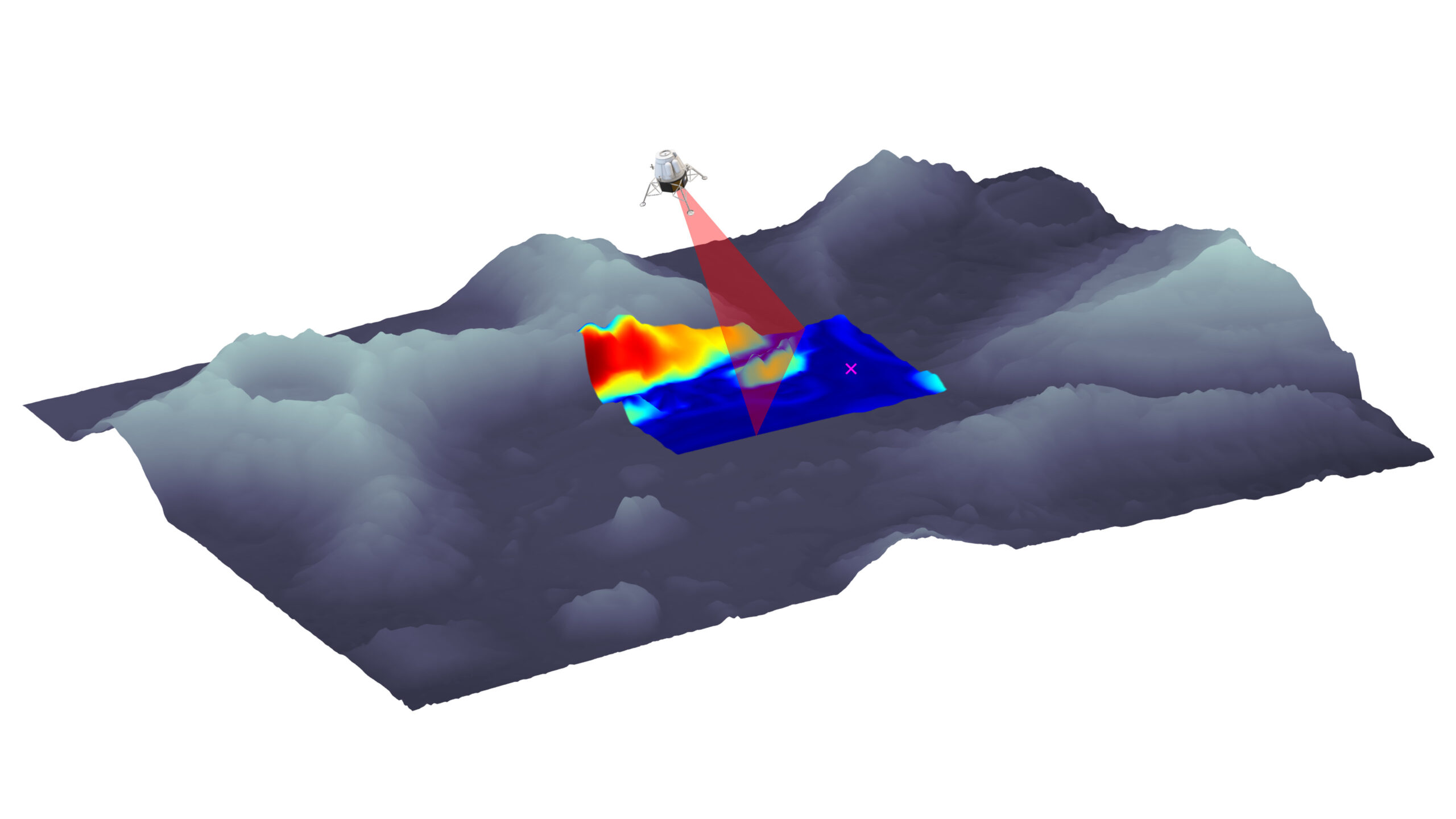
Le système logiciel de détection et d’évitement des obstacles de NGC permet de cartographier le terrain et détecter les obstacles afin de déterminer les sites sécuritaires en temps réel au cours des manœuvres d’atterrissage.
L’autonomie est essentielle parce que les retards de communication avec le sol et la nécessité de réagir rapidement excluent l’intervention humaine dans le processus. Ce système utilise les mesures de Lidar et de caméra afin de détecter et de repérer en temps réel les obstacles à la surface lors de la descente.
À partir des mesures de distance du Lidar, des images des caméras et de la connaissance du mouvement du module atterrisseur, le système calcule les différentes propriétés du terrain, comme les pentes, la rugosité, la clarté et la quantité de carburant requise pour atteindre le site. Ces données sont combinées en une seule carte des obstacles qui comporte une évaluation de la sécurité globale de chaque zone d’atterrissage potentielle. Le site d’atterrissage le plus sécuritaire, selon les critères susmentionnés, est suggéré par le système de détection et d’évitement d’obstacles. Cette évaluation se fait en temps réel, à quelques centaines de mètres au-dessus de la surface, pendant que le module atterrisseur effectue son approche finale.
Une des principales caractéristiques du système de détection et d’évitement d’obstacles de NGC est sa fonction de compensation du mouvement. Le système peut traiter les données d’un Lidar à balayage, lequel nécessite plusieurs secondes pour acquérir une image complète. Puisque le module atterrisseur est en mouvement lors du processus de balayage, l’image brute du capteur est distorsionnée. Cependant, à partir du mouvement estimé du module atterrisseur pendant le balayage, le logiciel de NGC compense le mouvement et supprime les distorsions de la mesure du capteur. Cette fonctionnalité évite d’avoir à imposer des contraintes d’immobilité strictes lors du processus de balayage et réduit ainsi la consommation globale de carburant de la mission.