Survol de la zone d’essai par drone
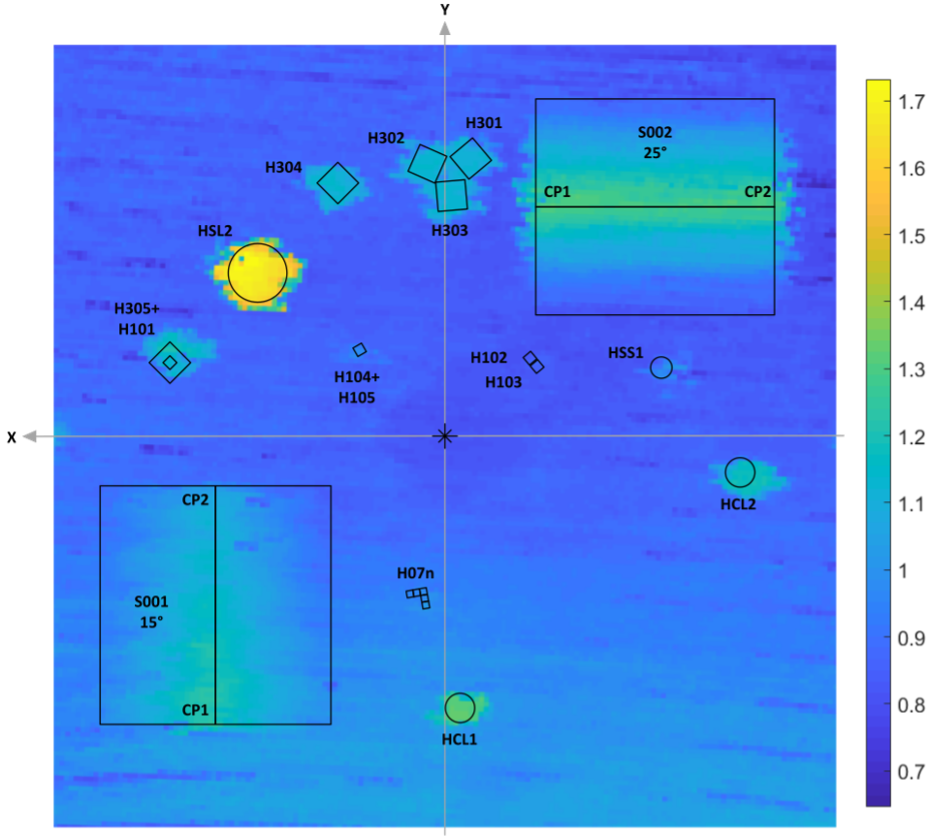
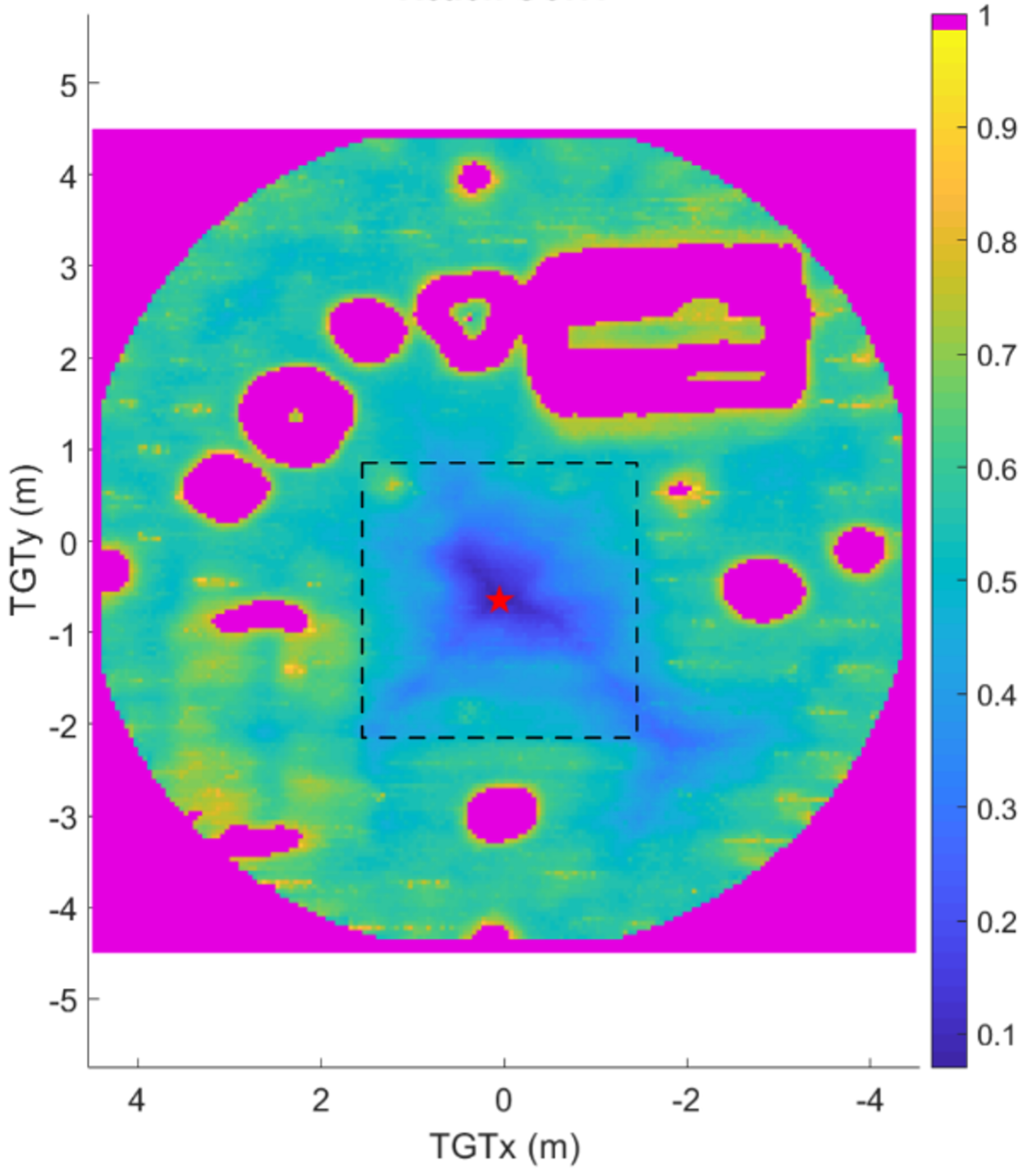
Le prototype a été en mesure de balayer le terrain à la résolution voulue au moyen d’un Lidar commercial abordable, puis de comparer les mesures du Lidar aux données de navigation du drone de manière à repérer les obstacles en surface pour recommander un site sécuritaire en temps réel.
Lorsque le système a été mis à l’essai en survolant des terrains plus ou moins accidentés à divers degrés de pente au-dessus d’une zone d’atterrissage de référence, il a été en mesure de détecter avec précision les obstacles sur la surface et de reconstruire la topographie de la zone pour évaluer en temps réel la pente et la rugosité de la surface pour recommander un site d’atterrissage sécuritaire.